
Bio
Hello! I am a second-year Ph.D. student advised by Prof. Kuk-Jin Yoon at the Visual Intelligence Lab (VILab), Korea Advanced Institute of Science and Technology (KAIST).
My research focuses on developing methods that reliably extract and utilize semantic information from visual data. I am broadly interested in how models can maintain semantic consistency across domains, modalities, and interaction scenarios.
Recently, I have become increasingly interested in multimodal setting and representation learning, including how strong foundation models—such as Diffusion models, and SAM/SAM2-style segmentation systems—can be adapted and leveraged for robust visual understanding. I also have interest in egocentric perception and the integration of cues like eye-gaze to enhance semantic interpretation and user interaction in immersive VR/AR environments. Currently, I am exploring Multi-Agent Reinforcement Learning, which I believe is the direction I should pursue as an AI researcher.
Ultimately, my research aims to understand how semantic structures can be extracted from diverse visual modalities and effectively applied to create more adaptive and intelligent perception systems. I am always open to discussions and collaborations—feel free to reach out anytime!
My CV can be found in here
Publications
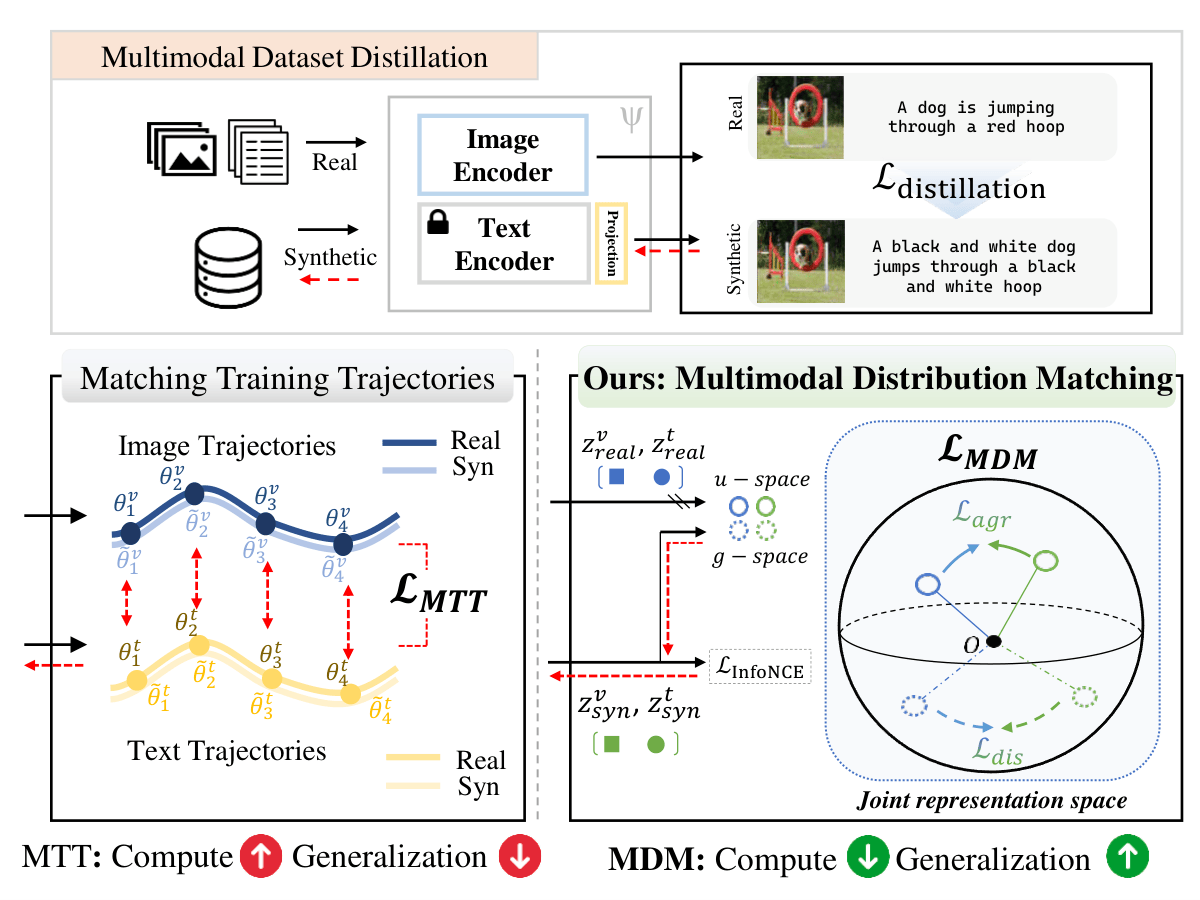
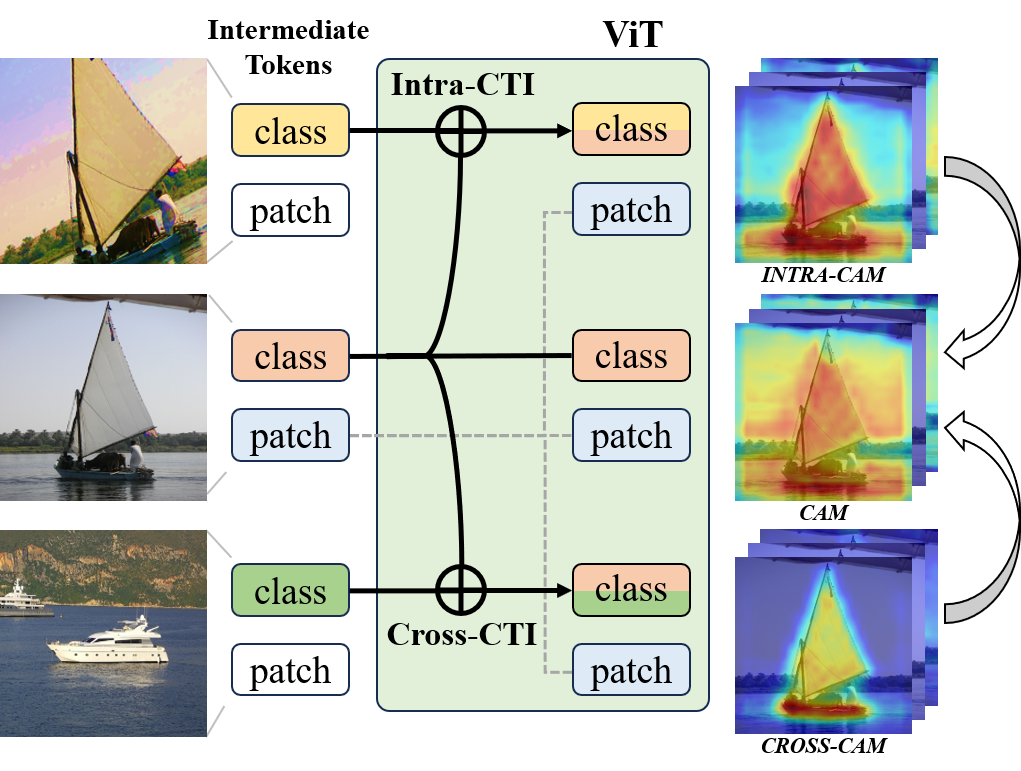
Jongoh Jeong*, Hoyong Kwon*, Minseok Kim*, Kuk-Jin Yoon
The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
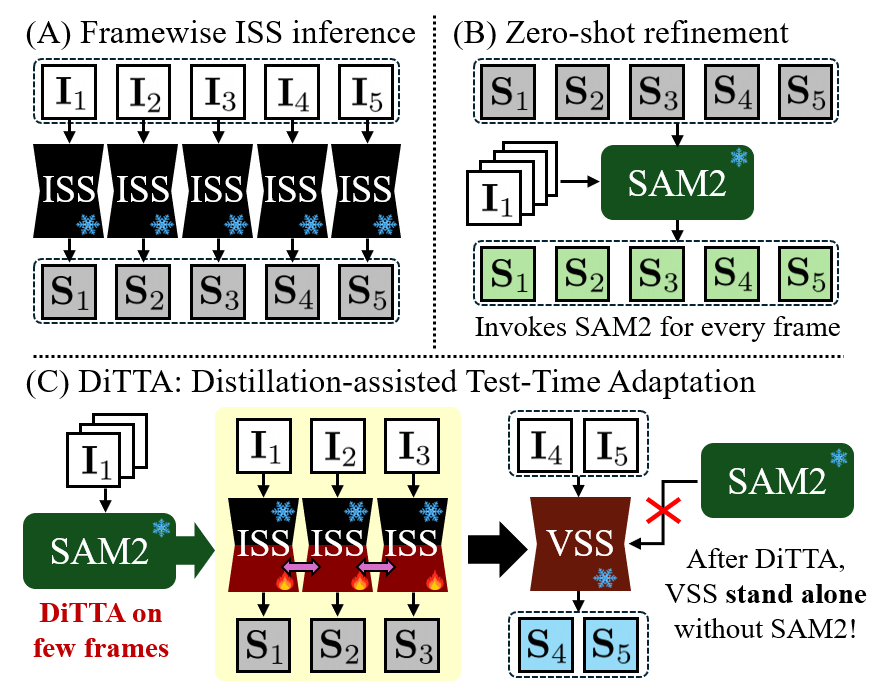
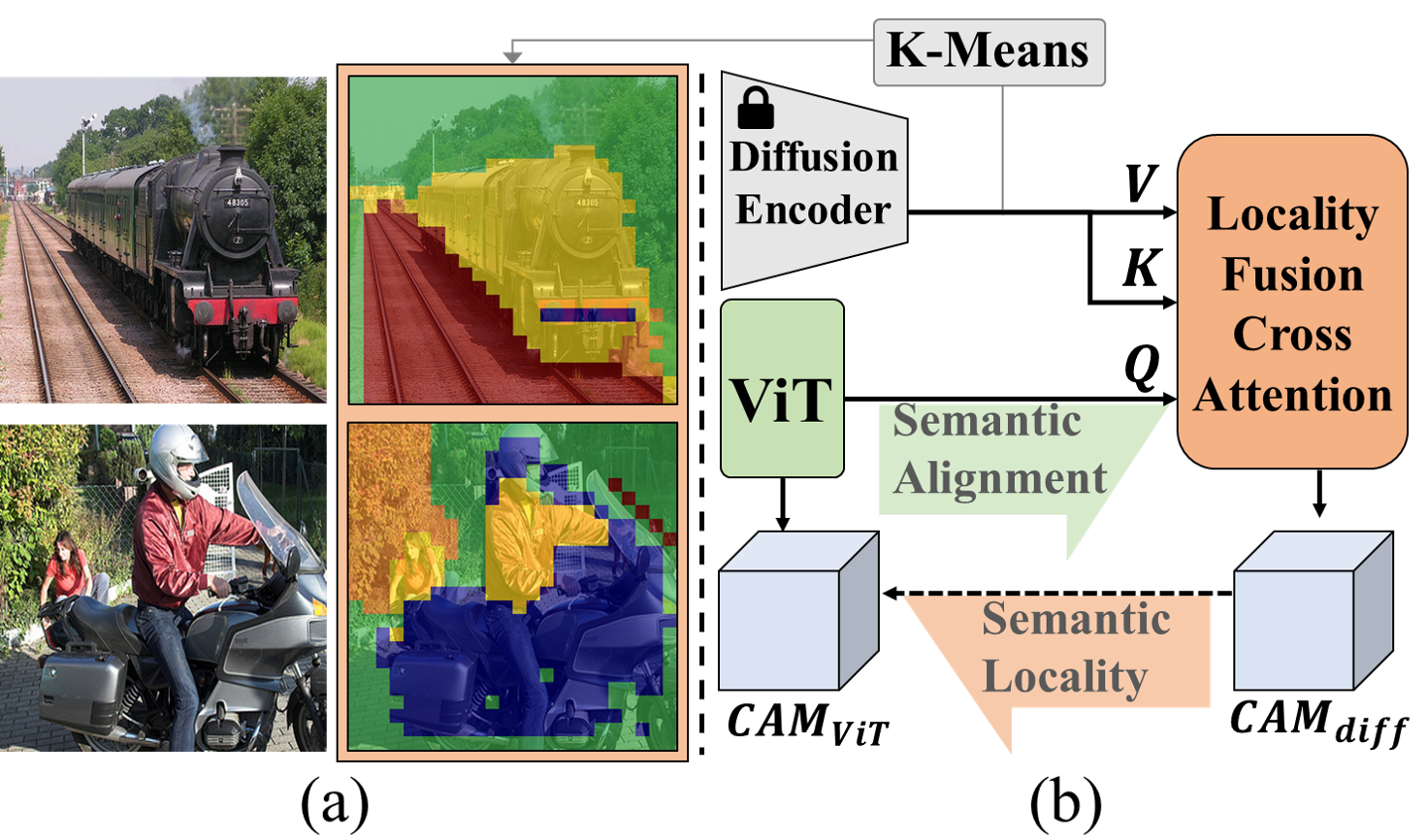
Jihun Kim*, Hoyong Kwon*, Hyeokjun Kweon*, Kuk-Jin Yoon
The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
Selected Honors and Awards
- 2023 / Magna Cum Laude, KAIST BS
- 2021-2022 / National Science & Technology Scholarship, Korea Student Aid Foundation
- 2020 / Dean’s List, KAIST College of Engineering
Research Experiences
- 2025.03 - Present / Project Leader / Development of Mobility and Connectivity Platform for Unmanned Autonomous Delivery / Multi-Modal Fusion, 3D Object&Lane Detection, ROS2
- 2024.01 - 2025.02 / Project Member / Development of Mobility and Connectivity Platform for Unmanned Autonomous Delivery / Multi-Modal Fusion, 3D Object&Lane Detection, ROS2
- 2022.03 - 2022.08 / Internship / NCSOFT Vision AI Lab Recognition Team / Keypoint Detection, Markerless Face Wrapping